



——Mula sa DWIN Developer Forum
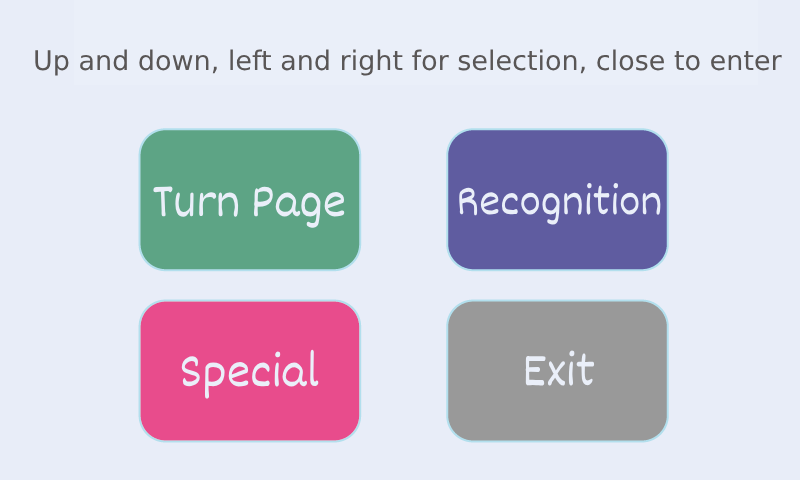
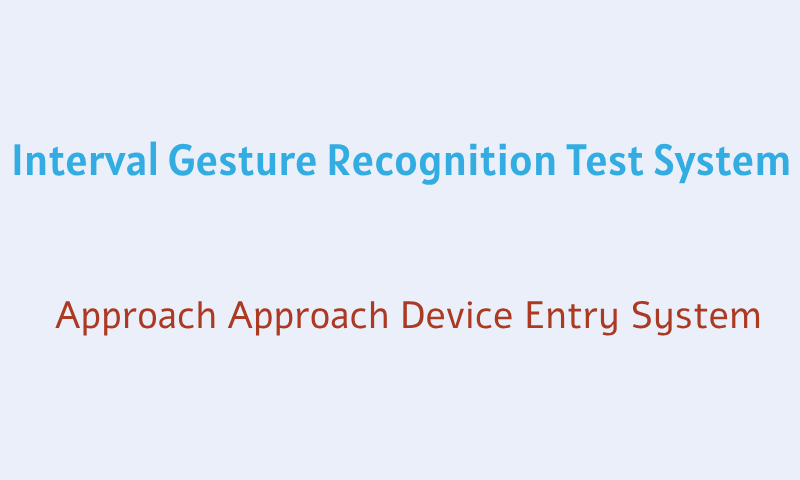
Sa isyung ito, ipakikilala namin ang award-winning na open source case ng DWIN Developer Forum – Interval Gesture Recognition Test System. Gumagamit ang mga engineer ng 7-inch COF smart screen para makipag-ugnayan sa PAJ7620U2 gesture recognition sensor sa pamamagitan ng T5L OS core. Hindi na kailangang gumamit ng anumang mga pindutan. Kailangan mo lang ilagay ang iyong kamay malapit sa sensor upang makapasok sa screen ng kontrol ng system ng menu, at ma-realize ang 9 na kilos na epekto ng pataas, pababa, kaliwa, kanan, malapit, malayo, kaliwa na pag-ikot, kanang pag-ikot, at pag-alog.
1.UIMmateryalDisplay
2.C51 Disenyong Inhinyero
Nakikipag-ugnayan ang T5L OS core sa PAJ7620U2 gesture recognition sensor para sa pakikipag-ugnayan ng data, natutukoy ang kasalukuyang kilos, tinutukoy ang kasalukuyang ipinapakitang larawan at ang larawang ipinapakita sa pamamagitan ng pag-ikot ng pahina, at napagtanto ang function ng paglipat ng mga pahina gamit ang mga galaw. Ang reference code ay ang mga sumusunod:
void select_operate(uint16_t gesrure_value)
{
if(gesrure_value == GES_UP) //pataas
{
if(select_value >= 2)
{
select_value -= 2;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
else if(gesrure_value == GES_DOWN) //down
{
if(select_value
{
select_value += 2;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
else if(gesrure_value == GES_LEFT) //left
{
if(select_value % 2 == 1)
{
select_value -= 1;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
else if(gesrure_value == GES_RIGHT) //right
{
if(select_value % 2 == 0)
{
select_value += 1;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
}
void turning_operate(uint16_t gesrure_value)
{
uint16_t i = 0;
uint8_t turning_mode = 0; //Page turning mode, 0 pataas, 1 pababa, 2 kaliwa, 3 kanan
uint16_t turning_count = 0; //Huling bilang ng mga pagliko ng pahina
if(gesrure_value == GES_UP || gesrure_value == GES_DOWN || gesrure_value == GES_LEFT || gesrure_value == GES_RIGHT)
{
if(gesrure_value == GES_UP) //pataas
{
turning_mode = 0;
turning_count = 48;
}
else if(gesrure_value == GES_DOWN) //down
{
turning_mode = 1;
turning_count = 48;
}
else if(gesrure_value == GES_LEFT) //left
{
turning_mode = 2;
turning_count = 80;
}
else if(gesrure_value == GES_RIGHT) //right
{
turning_mode = 3;
turning_count = 80;
}
if(turning_current_image == 0 || turning_current_image == 2)
{
turning_current_image = 1;
}
iba pa
{
turning_current_image = 2;
}
para sa(i = 0;i
{
switch(turning_mode)
{
kaso 0:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 0, 480 - i * 10);
t5l0_sys_delay_ms(20);
if(turning_last_image != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0, 0 - i * 10);
}
pahinga;
kaso 1:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 0, -480 + i * 10);
t5l0_sys_delay_ms(20);
kung(turning_last_image != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0, 0 + i * 10);
}
pahinga;
kaso 2:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 800 - i * 10, 0);
t5l0_sys_delay_ms(20);
kung(turning_last_image != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0 - i * 10, 0);
}
pahinga;
kaso 3:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, -800 + i * 10, 0);
t5l0_sys_delay_ms(20);
kung(turning_last_image != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0 + i * 10, 0);
}
pahinga;
}
t5l0_sys_delay_ms(20);
}
turning_last_image = turning_current_image;
}
}
Oras ng post: Mar-21-2024