



——Vum DWIN Entwéckler Forum
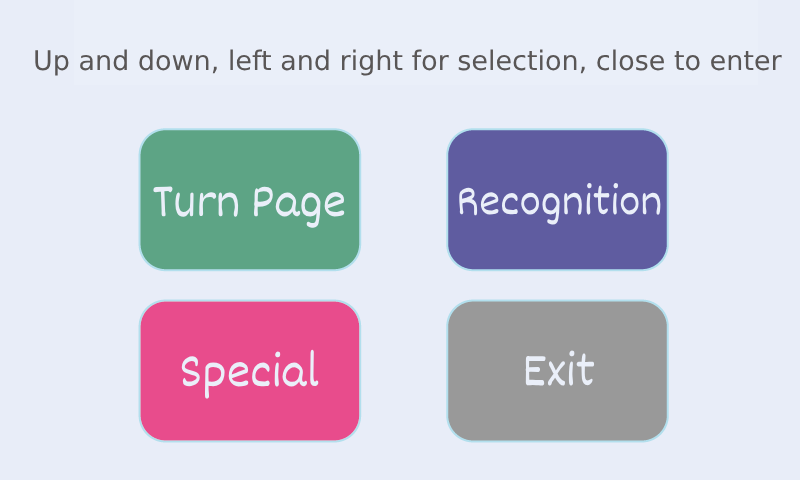
An dëser Ausgab wäerte mir de Präis-Zouschlag Open Source Fall vum DWIN Developer Forum aféieren - Interval Gesture Recognition Test System. Ingenieuren benotzen e 7-Zoll COF Smart Bildschierm fir mam PAJ7620U2 Gesteerkennungssensor duerch den T5L OS Kär ze interagéieren. Et gëtt kee Besoin fir Knäppercher ze benotzen. Dir musst just Är Hand no beim Sensor setzen fir an de Menüsystem Kontrollbildschierm anzeginn, a realiséiere 9 Geste Effekter vun erop, erof, lénks, riets, no, wäit ewech, lénks Rotatioun, riets Rotatioun, a Welle.
1.UIMMaterialDisplay
2.C51 Engineering Design
Den T5L OS Kär interagéiert mam PAJ7620U2 Geste Erkennungssensor fir Dateninteraktioun, detektéiert déi aktuell Geste, bestëmmt dat aktuell ugewise Bild an d'Bild ugewisen andeems Dir d'Säit dréit, a realiséiert d'Funktioun fir Säiten ze wiesselen mat Gesten. De Referenzcode ass wéi follegt:
void select_operate(uint16_t gesrure_value)
{
if(gesrure_value == GES_UP) //up
{
wann (select_value >= 2)
{
select_value -= 2;
}
dgus_show_variate_icon_location_set (SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
soss wann (gesrure_value == GES_DOWN) //down
{
wann (select_value
{
select_value += 2;
}
dgus_show_variate_icon_location_set (SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
soss wann (gesrure_value == GES_LEFT) // lénks
{
wann (select_value % 2 == 1)
{
select_value -= 1;
}
dgus_show_variate_icon_location_set (SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
soss wann (gesrure_value == GES_RIGHT) //right
{
wann (select_value % 2 == 0)
{
select_value += 1;
}
dgus_show_variate_icon_location_set (SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
}
void turning_operate(uint16_t gesrure_value)
{
uint16_t i = 0;
uint8_t turning_mode = 0; //Säit dréinen Modus, 0 erop, 1 erof, 2 lénks, 3 riets
uint16_t turning_count = 0; //Lescht Zuel vun Säit dréit
if(gesrure_value == GES_UP || gesrure_value == GES_DOWN || gesrure_value == GES_LEFT || gesrure_value == GES_RIGHT)
{
if(gesrure_value == GES_UP) //up
{
turning_mode = 0;
turning_count = 48;
}
soss wann (gesrure_value == GES_DOWN) //down
{
turning_mode = 1;
turning_count = 48;
}
soss wann (gesrure_value == GES_LEFT) // lénks
{
turning_mode = 2;
turning_count = 80;
}
soss wann (gesrure_value == GES_RIGHT) //right
{
turning_mode = 3;
turning_count = 80;
}
wann (turning_current_image == 0 || turning_current_image == 2)
{
turning_current_image = 1;
}
soss
{
turning_current_image = 2;
}
fir(i = 0;i
{
schalt(drechmodus)
{
Fall 0:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 0, 480 - ech * 10);
t5l0_sys_delay_ms(20);
if(turning_last_image != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0, 0 - ech * 10);
}
Paus;
Fall 1:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 0, -480 + ech * 10);
t5l0_sys_delay_ms(20);
if(turning_last_image != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0, 0 + ech * 10);
}
Paus;
Fall 2:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 800 - ech * 10, 0);
t5l0_sys_delay_ms(20);
if(turning_last_image != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0 - ech * 10, 0);
}
Paus;
Fall 3:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, -800 + ech * 10, 0);
t5l0_sys_delay_ms(20);
if(turning_last_image != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0 + ech * 10, 0);
}
Paus;
}
t5l0_sys_delay_ms(20);
}
turning_last_image = turning_current_image;
}
}
Post Zäit: Mar-21-2024