



——DWIN ડેવલપર ફોરમ તરફથી
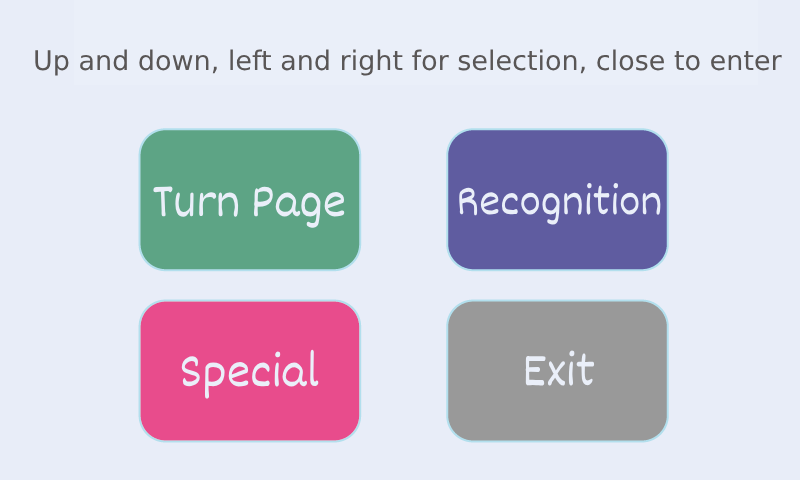
આ અંકમાં, અમે DWIN ડેવલપર ફોરમ - ઈન્ટરવલ જેસ્ચર રેકગ્નિશન ટેસ્ટ સિસ્ટમનો એવોર્ડ વિજેતા ઓપન સોર્સ કેસ રજૂ કરીશું. એન્જિનિયરો T5L OS કોર દ્વારા PAJ7620U2 હાવભાવ ઓળખ સેન્સર સાથે ક્રિયાપ્રતિક્રિયા કરવા માટે 7-ઇંચની COF સ્માર્ટ સ્ક્રીનનો ઉપયોગ કરે છે. કોઈપણ બટનનો ઉપયોગ કરવાની જરૂર નથી. મેનૂ સિસ્ટમ કંટ્રોલ સ્ક્રીનમાં પ્રવેશવા માટે તમારે ફક્ત તમારા હાથને સેન્સરની નજીક રાખવાની જરૂર છે, અને ઉપર, નીચે, ડાબે, જમણે, બંધ, દૂર, ડાબે પરિભ્રમણ, જમણું પરિભ્રમણ અને તરંગની 9 હાવભાવ અસરો અનુભવો.
1.UIએમસામગ્રીડીisplay
2.C51 એન્જિનિયરિંગ ડિઝાઇન
T5L OS કોર ડેટા ક્રિયાપ્રતિક્રિયા માટે PAJ7620U2 હાવભાવ ઓળખ સેન્સર સાથે ક્રિયાપ્રતિક્રિયા કરે છે, વર્તમાન હાવભાવને શોધી કાઢે છે, વર્તમાનમાં પ્રદર્શિત ચિત્ર અને પૃષ્ઠને ફેરવીને પ્રદર્શિત ચિત્રને નિર્ધારિત કરે છે, અને હાવભાવનો ઉપયોગ કરીને પૃષ્ઠોને સ્વિચ કરવાના કાર્યને સમજે છે. સંદર્ભ કોડ નીચે મુજબ છે:
void select_operate(uint16_t gesrure_value)
{
જો(ગેસર્યુર_વેલ્યુ == GES_UP) //અપ
{
જો (પસંદ_મૂલ્ય >= 2)
{
પસંદ_મૂલ્ય -= 2;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
બાકી જો(ગેસર્યુર_વેલ્યુ == GES_DOWN) //ડાઉન
{
જો (પસંદ_મૂલ્ય
{
પસંદ_મૂલ્ય += 2;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
બાકી જો(ગેસર્યુર_વેલ્યુ == GES_LEFT) //લેફ્ટ
{
જો (પસંદ_મૂલ્ય % 2 == 1)
{
પસંદ_મૂલ્ય -= 1;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
બાકી જો(ગેસર્યુર_વેલ્યુ == GES_RIGHT) //જમણે
{
જો (પસંદ_મૂલ્ય % 2 == 0)
{
પસંદ_મૂલ્ય += 1;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE, select_pos[select_value][0], select_pos[select_value][1]);
}
}
void turning_operate(uint16_t gesrure_value)
{
uint16_t i = 0;
uint8_t turning_mode = 0; //પેજ ટર્નિંગ મોડ, 0 ઉપર, 1 નીચે, 2 ડાબે, 3 જમણે
uint16_t turning_count = 0; //પાનાં ફેરવવાની છેલ્લી સંખ્યા
જો(ગેસર્યુર_વેલ્યુ == GES_UP || gesrure_value == GES_DOWN || gesrure_value == GES_LEFT || gesrure_value == GES_RIGHT)
{
જો(ગેસર્યુર_વેલ્યુ == GES_UP) //અપ
{
ટર્નિંગ_મોડ = 0;
ટર્નિંગ_કાઉન્ટ = 48;
}
બાકી જો(ગેસર્યુર_વેલ્યુ == GES_DOWN) //ડાઉન
{
ટર્નિંગ_મોડ = 1;
ટર્નિંગ_કાઉન્ટ = 48;
}
બાકી જો(ગેસર્યુર_વેલ્યુ == GES_LEFT) //લેફ્ટ
{
ટર્નિંગ_મોડ = 2;
ટર્નિંગ_કાઉન્ટ = 80;
}
બાકી જો(ગેસર્યુર_વેલ્યુ == GES_RIGHT) //જમણે
{
ટર્નિંગ_મોડ = 3;
ટર્નિંગ_કાઉન્ટ = 80;
}
જો (ટર્નિંગ_કરન્ટ_ઇમેજ == 0 || ટર્નિંગ_કરન્ટ_ઇમેજ == 2)
{
turning_current_image = 1;
}
બીજું
{
turning_current_image = 2;
}
માટે(i = 0;i
{
સ્વિચ કરો(ટર્નિંગ_મોડ)
{
કેસ 0:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 0, 480 - i * 10);
t5l0_sys_delay_ms(20);
જો (ટર્નિંગ_લાસ્ટ_ઇમેજ != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0, 0 - i * 10);
}
વિરામ;
કેસ 1:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 0, -480 + i * 10);
t5l0_sys_delay_ms(20);
જો (ટર્નિંગ_લાસ્ટ_ઇમેજ != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0, 0 + i * 10);
}
વિરામ;
કેસ 2:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, 800 - i * 10, 0);
t5l0_sys_delay_ms(20);
જો (ટર્નિંગ_લાસ્ટ_ઇમેજ != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0 - i * 10, 0);
}
વિરામ;
કેસ 3:
dgus_show_variate_icon_location_set(turning_current_image * 0x100 + 0x2000, -800 + i * 10, 0);
t5l0_sys_delay_ms(20);
જો (ટર્નિંગ_લાસ્ટ_ઇમેજ != 0)
{
dgus_show_variate_icon_location_set(turning_last_image * 0x100 + 0x2000, 0 + i * 10, 0);
}
વિરામ;
}
t5l0_sys_delay_ms(20);
}
turning_last_image = turning_current_image;
}
}
પોસ્ટ સમય: માર્ચ-21-2024