



——Del foro de desarrolladores de DWIN
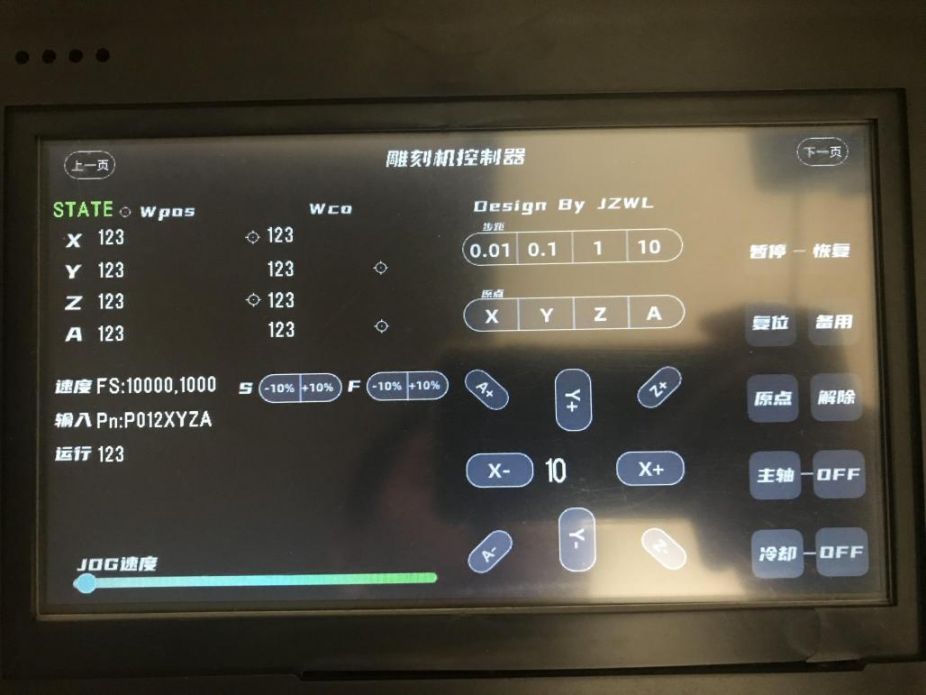
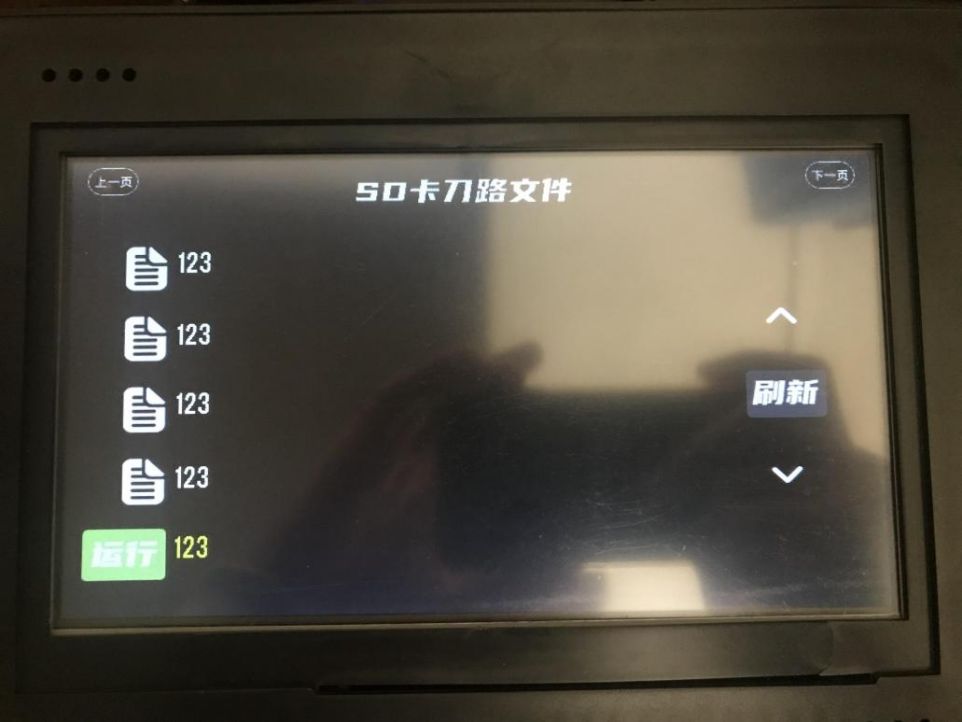
La solución adopta el chip T5L como control principal, controla GRBL a través del puerto serie 2 y acciona el motor para controlar el motor principal de la máquina de grabado para generar la ruta base de la ruta de grabado de los ejes X, Y y Z, para realizar la operación de grabado automático. Tiene las funciones de hermosa interfaz, control preciso, control multieje y configuración automática de herramientas.

Descripción:
1. Controle GRBL a través del puerto serie 2 de DWIN;
2. El puerto serie GRBL realiza la visualización de mensajes, segmentación e interceptación;
3. La pantalla controla varias funciones como el movimiento GRBL mediante el envío de instrucciones;
4. Admite control de volante, compatible con la definición de interfaz de volante Weihong;
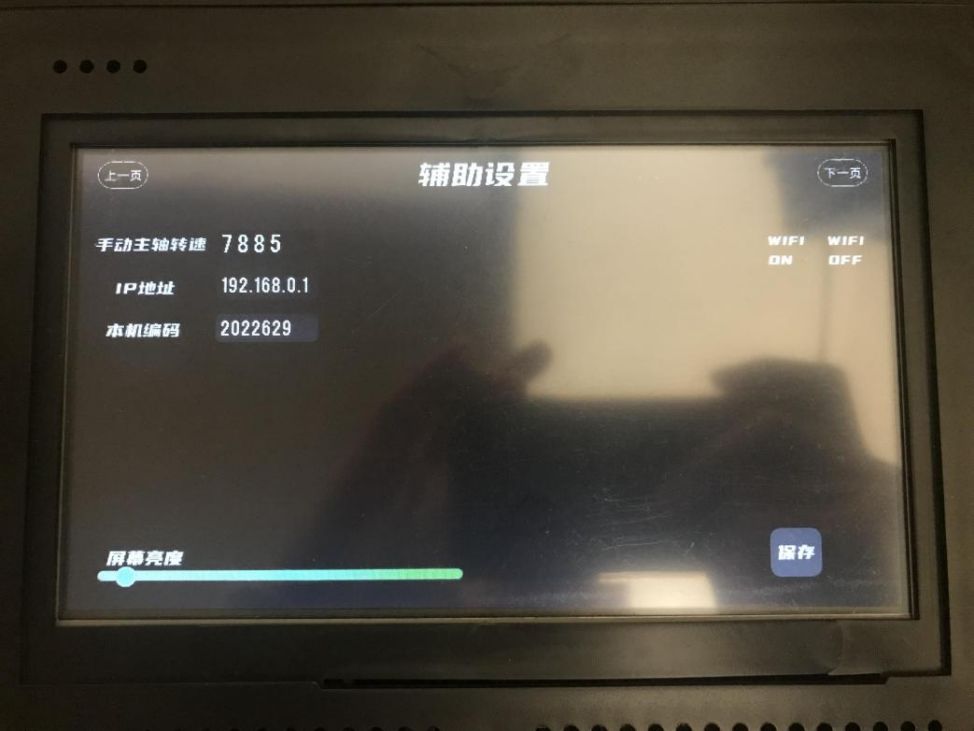
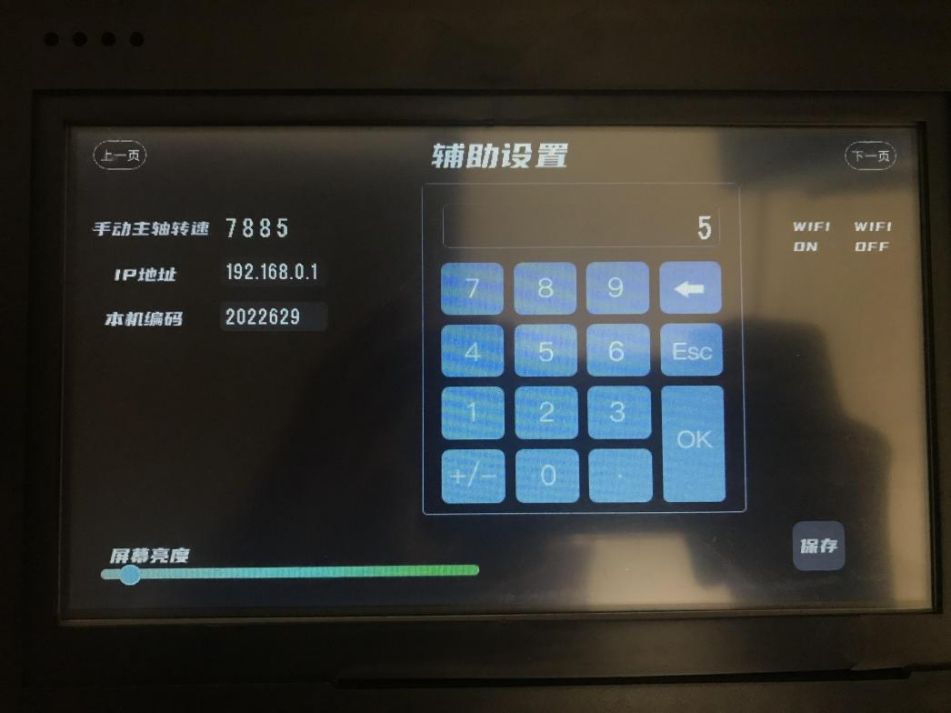
5. Los parámetros de la pantalla se pueden guardar después del apagado;
6. Controlando WS2812 para mostrar luces de estado como inactivo, detenido y en funcionamiento;
Diseño de solución:
(1) Dibujo de diseño de interfaz de ingeniería DGUS
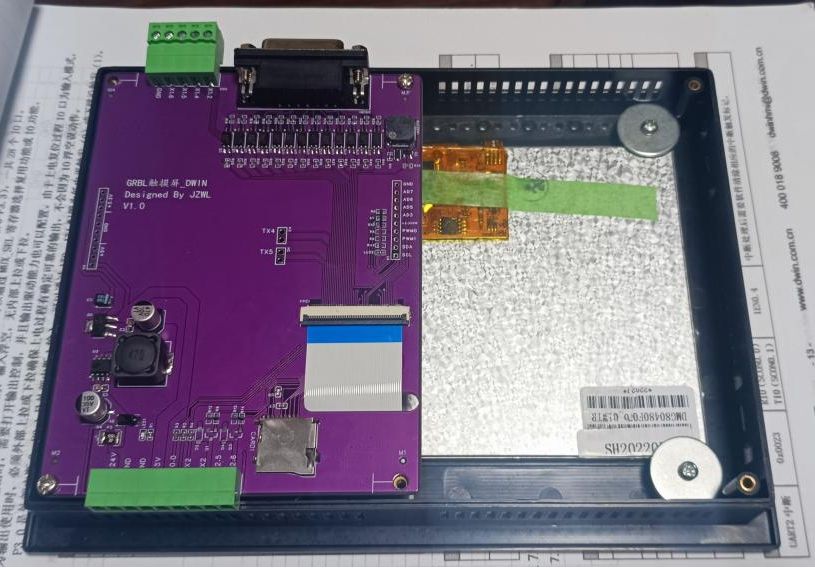
(2) Diagrama de plano posterior

Aviso:
1. El ESP32 de GRBL puede utilizar la versión original sin modificaciones;
2. Abra el archivo adjunto de descarga del archivo PCB de la pantalla con Easytron, y su diagrama esquemático y PCB se pueden probar directamente;
3. El archivo del kernel debe ser el más reciente. Este proyecto utiliza la versión del kernel en el archivo adjunto y el kernel debe actualizarse por separado.
Hora de publicación: 10 de enero de 2023