



——ከDWIN ገንቢ መድረክ
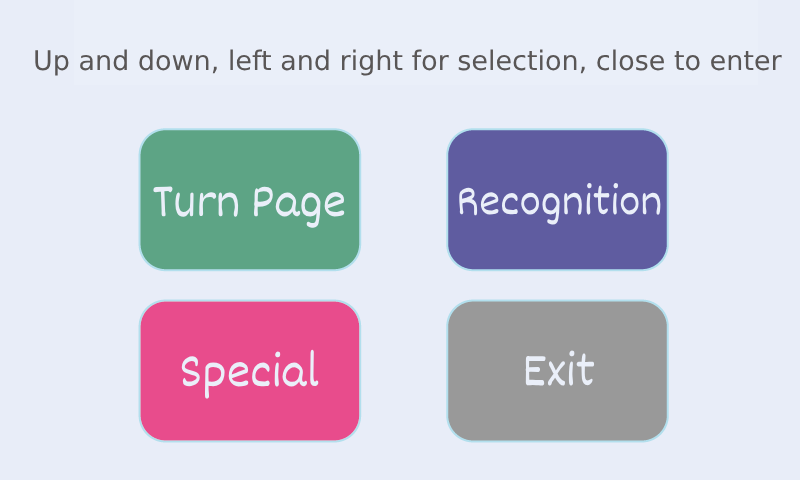
በዚህ እትም ውስጥ፣ ተሸላሚውን የDWIN ገንቢ መድረክ - የኢንተርቫል የእጅ ምልክት እውቅና ሙከራ ስርዓትን እናስተዋውቃለን። መሐንዲሶች ከPAJ7620U2 የእጅ ምልክት ማወቂያ ዳሳሽ ጋር በT5L OS ኮር በኩል ለመገናኘት ባለ 7-ኢንች COF ስማርት ስክሪን ይጠቀማሉ። ምንም አዝራሮችን መጠቀም አያስፈልግም. ወደ ምናሌው የስርዓት መቆጣጠሪያ ስክሪን ለመግባት እጅዎን ወደ ዳሳሹ ማቅርብ ብቻ ያስፈልግዎታል እና 9 የምልክት ምልክቶችን ወደላይ ፣ ወደ ታች ፣ ግራ ፣ ቀኝ ፣ ቅርብ ፣ ሩቅ ፣ ግራ መዞር ፣ ቀኝ መዞር እና ሞገድ ይገንዘቡ።
1.UIኤምቁሳቁስዲisplay
2.C51 የምህንድስና ዲዛይን
T5L OS core ከPAJ7620U2 የእጅ ምልክት ማወቂያ ዳሳሽ ጋር ለውሂብ መስተጋብር ይገናኛል፣ የአሁኑን የእጅ ምልክት ያገኝበታል፣ አሁን የሚታየውን ምስል እና ገጹን በማዞር የሚታየውን ምስል ይወስናል፣ እና የእጅ ምልክቶችን በመጠቀም ገፆችን የመቀየር ተግባር ይገነዘባል። የማጣቀሻ ኮድ እንደሚከተለው ነው.
ባዶ ምረጥ(uint16_t gesrure_value)
{
ከሆነ(የጌስሩር_ዋጋ == GES_UP) //ላይ
{
ከሆነ(እሴትን ምረጥ == 2)
{
ምረጥ_እሴት -= 2;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE፣ select_pos[select_value][0]፣ select_pos[select_value][1]);
}
ሌላ ከሆነ(የጌስሩር_ዋጋ == GES_DOWN) //ከታች
{
ከሆነ(እሴትን ምረጥ
{
ምረጥ_እሴት += 2;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE፣ select_pos[select_value][0]፣ select_pos[select_value][1]);
}
ሌላ ከሆነ(የጌስሩር_ዋጋ == GES_LEFT) //ግራ
{
ከሆነ (እሴት % 2 == 1 ይምረጡ)
{
ምረጥ_እሴት -= 1;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE፣ select_pos[select_value][0]፣ select_pos[select_value][1]);
}
ሌላ ከሆነ(የጌስሩር_ዋጋ == GES_RIGHT) //ቀኝ
{
ከሆነ (እሴት % 2 == 0 ይምረጡ)
{
ይምረጡ_እሴት += 1;
}
dgus_show_variate_icon_location_set(SELECT_DESCRIBE_RECTANGLE፣ select_pos[select_value][0]፣ select_pos[select_value][1]);
}
}
ባዶ ማዞር (uint16_t gesrure_value)
{
uint16_t i = 0;
uint8_t turning_mode = 0; //ገጽ መዞር ሁነታ፣ 0 ወደ ላይ፣ 1 ታች፣ 2 ግራ፣ 3 ቀኝ
uint16_t turning_count = 0; //የገጽ መዞሪያዎች የመጨረሻ ቁጥር
if(gesrure_value == GES_UP || gesrure_value == GES_DOWN || gesrure_value == GES_LEFT || gesrure_value == GES_RIGHT)
{
ከሆነ(የጌስሩር_ዋጋ == GES_UP) //ላይ
{
የማዞሪያ ሁነታ = 0;
የማዞሪያ ብዛት = 48;
}
ሌላ ከሆነ(የጌስሩር_ዋጋ == GES_DOWN) //ታች
{
የማዞሪያ ሁነታ = 1;
የማዞሪያ ብዛት = 48;
}
ሌላ ከሆነ(የጌስሩር_ዋጋ == GES_LEFT) //ግራ
{
የማዞሪያ ሁነታ = 2;
የማዞሪያ ብዛት = 80;
}
ሌላ ከሆነ(የጌስሩር_ዋጋ == GES_RIGHT) //ቀኝ
{
የማዞሪያ ሁነታ = 3;
የማዞሪያ ብዛት = 80;
}
ከሆነ(የአሁኑ_ምስል == 0 || መዞር_የአሁኑ_ምስል == 2)
{
የአሁኑን_ምስል መዞር = 1;
}
ሌላ
{
የአሁኑን_ምስል መዞር = 2;
}
ለ(i = 0;i
{
መቀየሪያ(መዞር_ሁነታ)
{
ጉዳይ 0፡
dgus_show_variate_icon_location_set(የአሁኑ_ምስል * 0x100 + 0x2000፣ 0፣ 480 - i * 10)
t5l0_sys_delay_ms(20);
ከሆነ(የመጨረሻ_ምስል!= 0)
{
dgus_show_variate_icon_location_set (የመጨረሻ_ምስል * 0x100 + 0x2000, 0, 0 - i * 10);
}
መሰባበር;
ጉዳይ 1፡
dgus_show_variate_icon_location_set(የአሁኑ_ምስል * 0x100 + 0x2000፣ 0፣ -480 + i * 10);
t5l0_sys_delay_ms(20);
ከሆነ(የመጨረሻ_ምስል!= 0)
{
dgus_show_variate_icon_location_set(የመጨረሻ_ምስል * 0x100 + 0x2000፣ 0፣ 0 + i * 10);
}
መሰባበር;
ጉዳይ 2፡
dgus_show_variate_icon_location_set(የአሁኑ_ምስል * 0x100 + 0x2000፣ 800 - i * 10, 0);
t5l0_sys_delay_ms(20);
ከሆነ(የመጨረሻ_ምስል!= 0)
{
dgus_show_variate_icon_location_set (የመጨረሻ_ምስል * 0x100 + 0x2000, 0 - i * 10, 0);
}
መሰባበር;
ጉዳይ 3፡
dgus_show_variate_icon_location_set(የአሁኑ_ምስል * 0x100 + 0x2000፣ -800 + i * 10፣ 0)
t5l0_sys_delay_ms(20);
ከሆነ(የመጨረሻ_ምስል!= 0)
{
dgus_show_variate_icon_location_set(የመጨረሻ_ምስል * 0x100 + 0x2000፣ 0 + i * 10, 0);
}
መሰባበር;
}
t5l0_sys_delay_ms(20);
}
መዞር_የመጨረሻ_ምስል = መዞር_የአሁኑን ምስል;
}
}
የልጥፍ ጊዜ: ማርች-21-2024